BTM_Pix
-
Posts
6,131 -
Joined
-
Last visited
Content Type
Profiles
Forums
Articles
Everything posted by BTM_Pix
-
OK, here is the spec and there are indeed no internal NDs. https://www.blackmagicdesign.com/uk/products/blackmagiccinemacamera/techspecs/W-CIN-20
-
The reworked Micro Studio Camera then... looks with the new additions that they've accidentally created the box P4K that everyone has been asking for. A nod to Panasonic there that its possible to bring out a new MFT camera that isn't the size of a brick. However...... Unless I missed it, does that new 6K not have the ND filters ? It wasn't mentioned and looking at the rear panel the +/- buttons to control it that the P6K Pro has were not there. The AF looks like the familiar standard too though and I'm guessing much would have been made if it had something new in that department * Full frame, L mount and CDAF..... Its pretty much a BRAW shooting version of the original S5 without the IBIS then 😉 Looks pretty good but not the complete revolution many were predicting/expecting/hoping for. *yes, yes real cinema cameras have no AF anyway etc but don't say that you wouldn't love it if it had it..
-
Or maybe "Oh shit, who added the two extra zeroes to that order for the S5ii body shells ?"
-
Unfortunately, I think that is what is going to happen and we won't see any more of the compact ranges. In this case my question was if they were going to go big what else could they have fitted in there. Specifically, ND filters. Unfortunately for Panasonic - and the rest of us - the 0.75mm difference in flange focal distance between MFT and L mount is in the wrong direction for them to offer an adapter, because that would justify the transition in at least providing an option for current MFT users to move up. As we know from the LS-300, the majority of MFT lenses cover APS-C (and those that don't can use a 10-12% additional crop) so they could have made a very attractive APS-C L mount camera with appeal to both sides of the fence.
-
Click the link for the live presentation. The consensus seems to be that its a new camera so still a few hours left to speculate wildly.
-
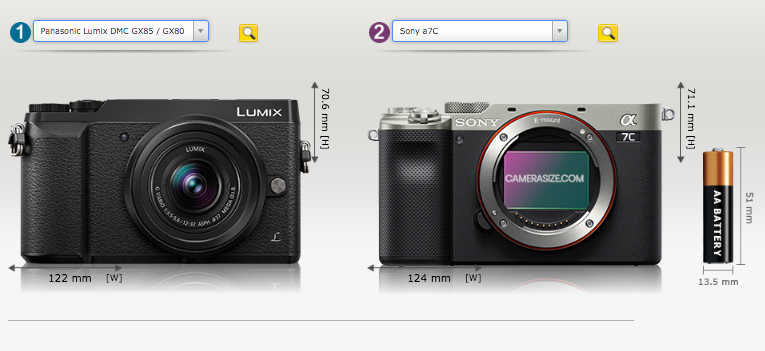
There doesn't necessarily have to be a size relationship with the additional power though - and certainly not the disproportional one that we are seeing with Panasonic's latter cameras. To add some real world perspective to both of your points, this is what is possible if the will is there and would mean you could have your cake and eat it too if they had a different policy.. The a7Cii on the right is full frame, 10 bit 4:2:2, IBIS, AI PDAF, Slog3, S-cinetone etc etc etc and is only marginally bigger than the GX80. That was a route they could've gone down but their idea on how to bring comparable features to a smaller sensor camera was this : So for you to have discretion while you are inside the museum and all the power boost in features for when you aren't whilst keeping the same lens mount, that is the setup you are forced to have to have in MFT now. Its faintly ridiculous when you look at the a7Cii in particular as you only need the one camera as you have all the power you need in either scenario and staff are unlikely to kick you out of the museum when they see you using such a discreet camera. Unless, of course, they think you are from the British Museum and are trying to steal the exhibits. I think AI will sort this problem in the very near future. BM have had the gyros in the camera from day 1 but never activated them until recently whilst they made the data operable so I'd expect to see rapid growth in that area. The lens data is obviously also recorded in the metadata of your video files. You never know, there might be something funky in that new camera they are supposed to be launching later today 🙂

-
Go motorhome/camper shopping with my wife. The layout deliberations makes my pre-purchase machinations over cameras (where they are almost always superseded before I finish my deliberations) look like impulse purchases. I'm hoping that we reach a conclusion about which one to buy before I am too decrepit to actually drive the thing. I think it might be a bit more prosaic and related to the authorisation period where their first post won't appear until they've been approved which can take a couple of days. So they are likely just too impatient in this attention span of a goldfish with a markedly short attention span even for a goldfish era. As well as being wankers.
-
I often wondered what would come first, Panasonic putting PDAF in an MFT camera or aliens being discovered. Based on whats going on in Mexico today it looks like Panasonic just about won that contest. Maybe the aliens had them under an NDA.
-
I'm not sure who's more excited about this really. You for receiving your new camera or the rest of this forum that a new member started a thread asking for camera buying advice and then didn't disappear never to be heard from again. Well done on both fronts !
-
Somewhere in France next summer a wedding party recoils in horror.
-
The a1 has by and large flown under the radar so its diminishing price on the used market does make it an interesting proposition a bit down the road to do a poor man's 10% of the price / 90% of the image version of the Burano with one. Need a name though. Base it on the Venice* obviously, so it has to be something with lots of canals. But a bit more rough and ready to reflect the price. And a bit more northern for the dourness and attitude. Right, the Birmingham it is then. * Fun fact is that Birmingham is one of the gazillion places referred to as the Venice of the North but in actual fact it should be that Venice is called the Birmingham of the South as Birmingham actually has more miles of canals. All built by order of The Peaky Fucking Blinders presumably.
-
Not sure I could stop myself turning into Vic Reeves every time I had to say Burano though
-
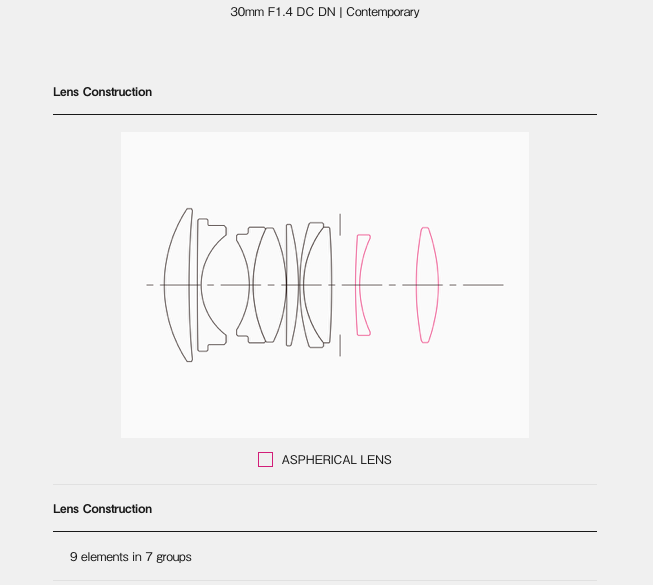
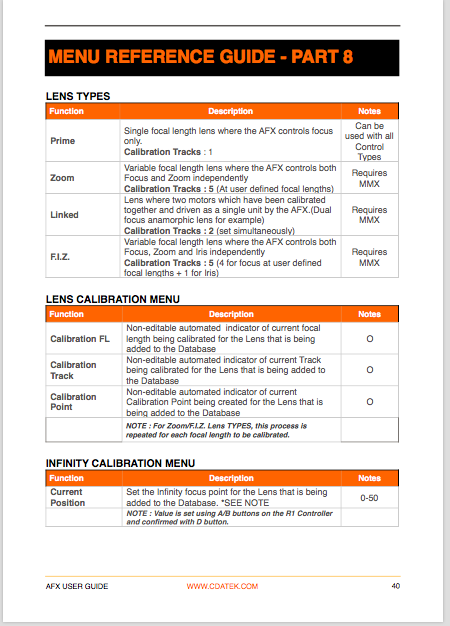
I have acute Main Character Syndrome. Its always about me. I pride myself on my Morrissey levels of unhappy-go-pesimistic and deep seated lifelong grudges so I doubt its that. I just accept that people talk a lot of shit on the internet. And that a lot of people are hysterical Marys. Hence, my ignore list is extensive. Well, to be fair, its right there on the front page of their organisation that does have the power to decide that. "Micro Four Thirds is a versatile and highly mobile system that meets all kinds of photographers' needs and chases an optimal balance of high image quality, compactness and lightweight in cameras with interchangeable lenses." https://www.four-thirds.org/en/ The semantics can be argued regarding the relativity of the elements of the balance but there is no doubt that the thrust of it is in the direction of smaller. Otherwise, what would be the point of differentiation or even mentioning it. They could have saved some space and just put: "Micro Four Thirds is a versatile system that meets all kinds of photographers' needs in cameras with interchangeable lenses" Then I have misunderstood a whole swathe of your posts in regard to this matter. My understanding was that one of your primary desires was for a camera that had the discretion necessary for you not to be ejected from museums and galleries. Which is why I would advocate for and made the point for the more demanding internals of the GX80 to be housed in something faintly approaching but not matching the Fp but with its heat management system. It would be entirely possible so making the cameras in the form factor of the G9ii is a choice not a necessity. Which is perfectly fine because its their choice. And its my choice in terms of buying it. So we all get our own way in the end. Its actually 9 in 7. It does APS-C coverage and is a bit faster too so it is to be expected. There is a specific lens type that can be calibrated called "LINK" It is similar in terms of connection to the "FIZ" option in that it uses the MMX multi mode expander option but only uses two motors. Unlike "FIZ" where the AFX gives you independent control of each motor, the two motors in "LINK" mode are as the name suggests linked. During calibration, you adjust the focus of the anamorphic lens with one motor and the focus of the taking lens with the other motor until the image is in focus. Once calibrated, the motors then automatically move the two lenses to their respective focus points based on the distance to the subject detected. It did but the gap is much narrower now. I'm very surprised - pleasantly so - by how good it is on the S5ii. But all of that goodness is relative to within the context of how you view IBIS anyway. The irretrievably destructive nature of it in terms of the distortion of the image (not just in the "that doesn't look steady") is what puts me off it far more than the "is it actually looking stable" or the perceived "oh it looks too floaty for me" aspect. The double whammy with this is that it not always easy to see what it has done when you are looking on a small monitor/EVF so you tend not to find out until its too late. Tripods and balanced shoulder rigs still remain by far the better and safest option but its not always practical of course so its all just part of those compromises when you aren't in control of the environment. I do have a way of testing IBIS systems that involves putting a 1/4 20 mounting point on something that has repeatable and controllable degrees of small lateral movements but I suspect that using the item that I have in mind would mean that the results would only be available on OnlyFans.
-
You saw that one too then 😂 I must say looking at some of the footage from the Burano did have me immediately thinking about the a1 and was surprised to see how cheap that one was. I had presumed that the a1 could do 8K RAW out to the Ninja V+ but it can only do 4K though. The a1 is still a lot of camera for that money though.
-
Come on, it really doesn't suck. Its odd then after how after I "persuaded" the GX80/85 to be able to have Cinelike D that there was a subsequent mass obsession with trying to get VLOG on it. 😉 Physics determines this to be true of course for most smaller sensor versus large sensor comparisons, until very recently where the gap has closed somewhat. So its all part of the +/- mix. Is it enough for me ? Personally yes but I'm also a bit old fashioned with regard to using those three legged (or one legged) things that you can put underneath cameras so I'm not fully reliant on it. Which completely rebalances everything in the equation. Any perceived gap in video performance in favour of the GX80/85 is completely blown out of the water by the gulf in favour of the A7Rii when it comes to stills. Being able to plug a microphone into it doesn't do it much harm either.
-
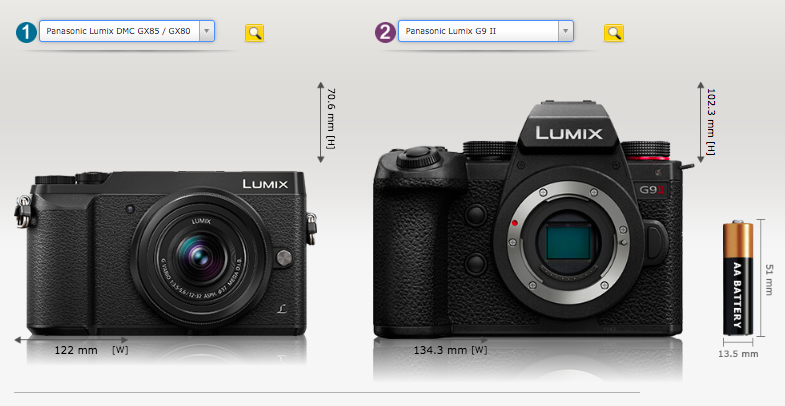
Not sure why you are couching it in such dramatic terms as people throwing their cameras out of the pram. There were no hissy fits and not all the old camera were disposed of, rather that the more the new cameras moved away from the original ethos the less inclined people like me were to replace their old ones. I didn't stop buying new Lumix MFT cameras post the GX80 in some fit of pique, its because the form factor of the new ones became increasingly at odds with the point of the system. The system appealed as a much smaller alternative to the bulkier FF and APS-C DSLRs that I had so I was less inclined to buy the newer ones as they began to expand and, of course, this became even more acute when mirrorless FF and APS-C cameras started to come down and meet them in the middle. I didn't mind making the compromise on IQ and low light when it was traded off for size but once that size increased then its advantages as a system went the other way. I didn't and haven't stopped using mine but it has diminished with each passing year over the past five years. Not because they have become unusable just that their USP is no longer anywhere near the U and there are better alternatives. The lenses were always shared with the OG Pocket and Micro and the LS300 but have also found a new home with the P4K but absolutely nothing would tempt me into buying into a new MFT camera and new lenses. I've just got three of my cameras out (GX80,S5ii and Fp) which have similar-ish focal length lenses to illustrate my broader point about MFT. If the G9ii is - as I understand it - even anywhere close to the size one in the middle then a shark has not only been jumped but pole vaulted over. Whilst the S5ii is the elephant in the room when it comes to a choice of buying into a new MFT camera, the Fp is the elephant in the room when it comes to where the system should have gone. An updated GX80 with all the bells and whistles of the G9ii in a form factor somewhere between the GX80 and Fp (which lest we forget has a proper cooling system) would have made me interested as it fits with the original ethos. The lenses are another example of where compact has gone with MFT when I look at a couple of my lenses. They are not the same focal length but still it illustrates how the size has increased from the original ethos of those original pancake lenses like the 20mm here and the 14mm if you want to take the next step up. And of course the Sigma here is actually pretty compact in relative terms to the latter primes and zooms from Panasonic. Coming ? It has been there in the DJI guise - and modesty forbids me to mention from another bijou manufacturer too - for well over three years. With regard to anamorphic, the support for aligned multi motors means that the smaller manufacturer also provides AF for dual focus anamorphic setups 🙂 All that Panasonic is doing with DJI for non manual lenses is basically what that other guy does with Blackmagic in that it uses the LIDAR to control the camera's internal focus motors. If Panasonic had opened their control protocol up in the same way as BMD then the other guy would have done the same for Panasonic cameras three years ago. So they are playing catchup more than innovating to be honest. The innovation would have been for Panasonic to integrate LIDAR into the cameras themselves. Manufacturer maybe but Sony E and Nikon Z users have been able to do this for quite a few years using the TechART such as my A7Rii with a Voigtlander here. In terms of "easy AF on MF lenses" it is actually much easier to use than an outboard LIDAR system too for several reasons as well. It also brings me back to another comparison between that A7Rii and a GX80 with a similar f1.4 focal length lens. Not only is the A7Rii full frame, it too also has IBIS too and the AF with that MF lens is far snappier than the MFT setup at a marginal overall size increase. Maybe I actually should throw that GX80 out of the pram after all 😉
-
Sigma really delivered for MFT with their 16/30/56 f1.4 primes but have obviously seen the writing on the wall and only offer the new 24 f1.4 and 18-50 f2.8 additions in X and L mount. Those two lenses would have really rounded out that range for a compact, fast and affordable set. The prices are getting too big as well. The 18-50 f2.8 in X or L mount is £400 while a comparable if slower variable aperture Panasonic 12-60mm f2.8-4.0 in MFT is twice that price. There is still plenty of value in the original pancakes etc of course but it gets pretty expensive pretty fast taking the step above those. That LC-1 they did way back when was a handsome bastard so I'd definitely like to see a modern version.
-
The R5 was a bit of watershed moment because we proved that there was a deliberate obfuscation by Canon but it also shod light on the shilling and/or powderpuff testing aspects of a swathe of the YouTube bros. The reaction from many of them to the original report by @Andrew Reid was particularly vicious and then, sans apology, they then made shameless hay by doing the shock faced testing videos. Never once acknowledging that not only was the camera on fire but also their pants. I think it then died off because it was belatedly addressed through firmware and people shrugged and said "well no one is going to risk releasing an overheating camera again". Neither aspect was re-dressed fully though so it has been waiting to come back again, not least because a lot of the bros have invested serious crypto into those stock footage flames to do the follow up "honest re-test" videos after they've surfed the wave of the initial "reviews". I might be being a bit cynical there though 🙂
-
That is where I'm going with this to be honest and, despite all the hand wringing on here about it, I don't think the motivation for change will come until the 10% become the 90%. Maybe the EU will come galloping (or more likely sashaying considering the pace they work at) to the rescue with a standard rating system for cameras denoting the number of overheating shutdowns per hour. Call it the Sum of Heat Induced Terminations and measure it on a 1-10 scale with the higher number obviously being the worst. It would offer more clarity and might actually shame them into doing something about it. "So, Mr Sony, regarding overheating, what is the SHIT rating for this new camera ?" "Oh, its very SHIT indeed."
-
The amount of heat (boom tish) the thermal issue is generating recently is quite interesting to me. Its always been there in the background of course and the R5 was a wild ride while we were investigating it but it’s back with an increased vengeance recently. What interests me is if anyone on here actually works in a camera shop and if so how much cut through does this issue have with the average customer? How far down the list - if it even appears anywhere - is it on the list of questions posed by customers when they are running through a product? And how many cameras do you have returned by customers due to them, for example, going on holiday and discovering their new toy needs more sunscreen than they do? I’m curious because manufacturers seemingly show no interest in tackling it definitively and I would have to guess that it is because they are comfortable with the amount of, erm, heat they receive from dealers and customers about it. Looked at another way, how many more ZV cameras would Sony get returned for ingress of water/sand/avocado if they adopted a vented cooling system than they do now from the inconvenient but recoverable overheating issues.
-
Nikon and Fujifilm need to slow these releases down. I never got round to buying the previous three nailed on forever cameras and now a new one turns up. It does look to be the last word so maybe this time I’ll jump in before forever runs out !
-
I’ll preface this by saying that that is some spec and it will likely be a very decent camera. However…. A smaller sensor inside a smaller body with smaller lenses at a smaller price was the whole raison d’etre of the Micro Four Thirds system. The clue was right there in the name. Panasonic seems to have looked what BMW has done since it acquired the Mini and thought “yeah, that’s the path for us too”. In a world where their own full frame S5ii exists, let alone the compact APS-C feature laden cameras from all the other manufacturers, I don’t get where they are coming from with their latter day MFT releases and, in my opinion, they have completely lost their way with the system, particularly in terms of attracting new adopters. Even for the old guard, you’d have to be pretty attached to that native lens collection to go in again. Panasonic seem to have a borderline kinky reluctance to refresh the two cameras that would actually cause a resurgence in the ideology of the system as well as sales. Namely, the GX80 and the LX100. Putting a mic jack on them and giving them 10 bit 4:2:2 internal and VLOG would be a piece of piss for Panasonic and they could sell them all day long at their equivalent launch prices. They might have to push the boat out and put IBIS in the LX but I don’t even think that is a deal breaker. I’m at loss to where they are getting their market research from that’s telling them there is. Bigger demand for small sensor cameras in large sensor bodies at large sensor prices.
-
 Its just different naming conventions between different manufacturers - or, more specifically, a lack of naming conventions - but they amount to exactly the same thing functionality wise. So, no doubt there are manufacturers out there who landed on a different part of the thesaurus and have named theirs Adjusters or Modifiers etc. Prefixing whatever term they use with "Wide Angle" is also a bit of a misnomer anyway as it doesn't convert or adapt a lens into a wide angle lens (commonly defined as having a focal length of say 24-35mm) but just reduces the focal length by the 0.8/0.7/0.6x indicated on it. So whilst a 50mm lens with a 0.7x can be considered to effectively have "become" a 35mm and therefore a "wide angle" lens in common terms, putting the same 0.7x on a 200mm lens will only make that "become" a 140mm, which is very much not a "wide angle" lens in common terms. Basically, for "Wide Angle" read "Wider Angle".
Its just different naming conventions between different manufacturers - or, more specifically, a lack of naming conventions - but they amount to exactly the same thing functionality wise. So, no doubt there are manufacturers out there who landed on a different part of the thesaurus and have named theirs Adjusters or Modifiers etc. Prefixing whatever term they use with "Wide Angle" is also a bit of a misnomer anyway as it doesn't convert or adapt a lens into a wide angle lens (commonly defined as having a focal length of say 24-35mm) but just reduces the focal length by the 0.8/0.7/0.6x indicated on it. So whilst a 50mm lens with a 0.7x can be considered to effectively have "become" a 35mm and therefore a "wide angle" lens in common terms, putting the same 0.7x on a 200mm lens will only make that "become" a 140mm, which is very much not a "wide angle" lens in common terms. Basically, for "Wide Angle" read "Wider Angle". -
Prompted by a tweet from @Andrew Reid about BBC drama production in the 70s/80s, I remembered this gem of a YouTube channel where the production staff of the era discuss and reproduce their work. The videos are a combination of bitesize and longer form and covers every stage of the production process such as these. It is a fascinating collection of pieces and much can be learned and applied to shooting and editing today. Not least of which how lucky we are to have what we have at our disposal. Full collection here https://www.youtube.com/@AdapttvhistoryOrgUk/videos
-